OASIS SIM-智驾仿真平台
OASIS SIM 定位为一个开放的仿真基础平台, 与 Carsmos 内其他开源项目组成完整智能驾驶研发工具链,
降低研发门槛, 提高研发自由度和可维护性。此仿真工具支持用于感知规划控制全闭环测试的全渲染模式和针对规控级自动驾驶算法的线框模拟模式。
全渲染模式
线框模拟模式
主要功能
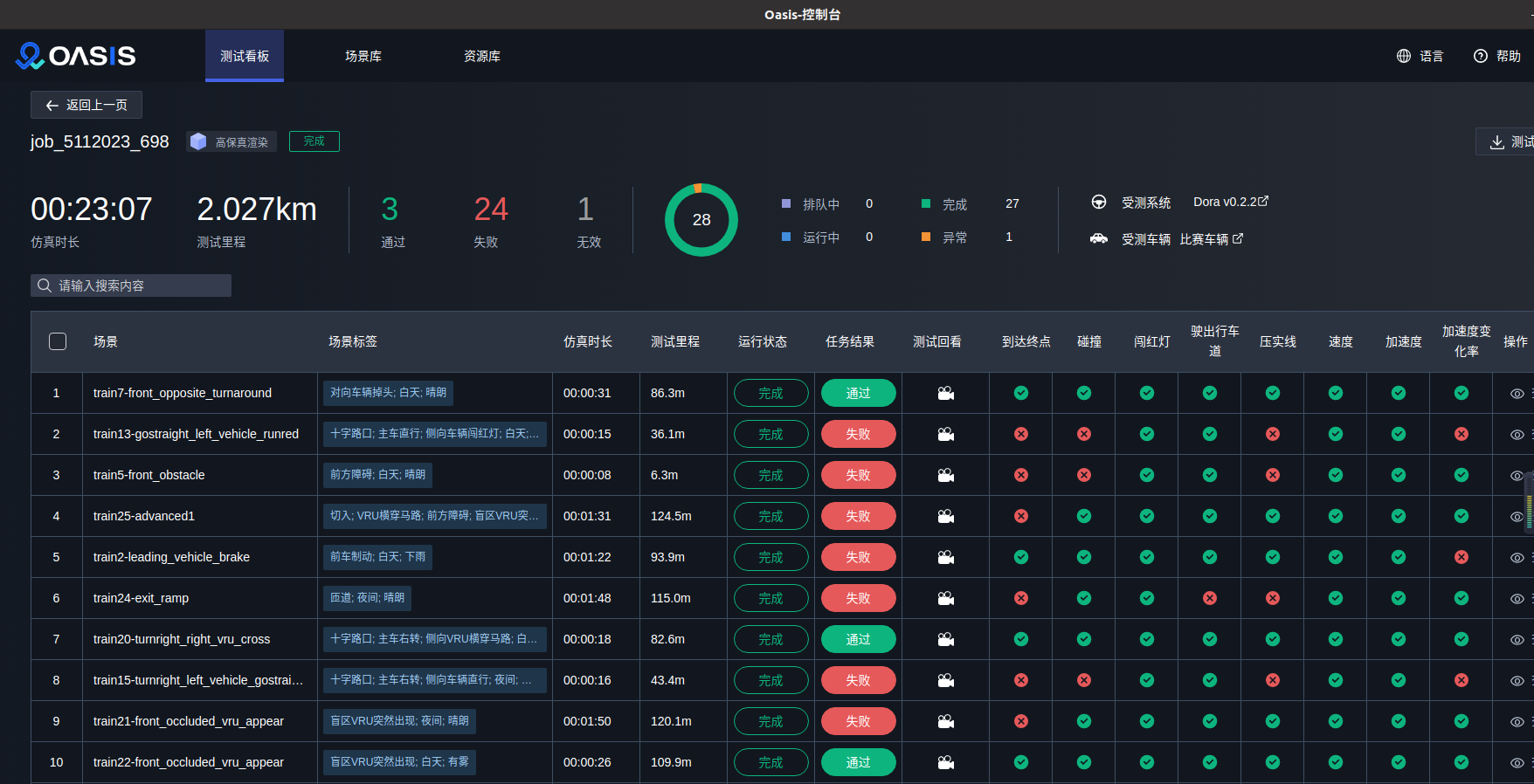
仿真任务管理
通过简单的可视化设置,使用户创建和管理仿真任务:
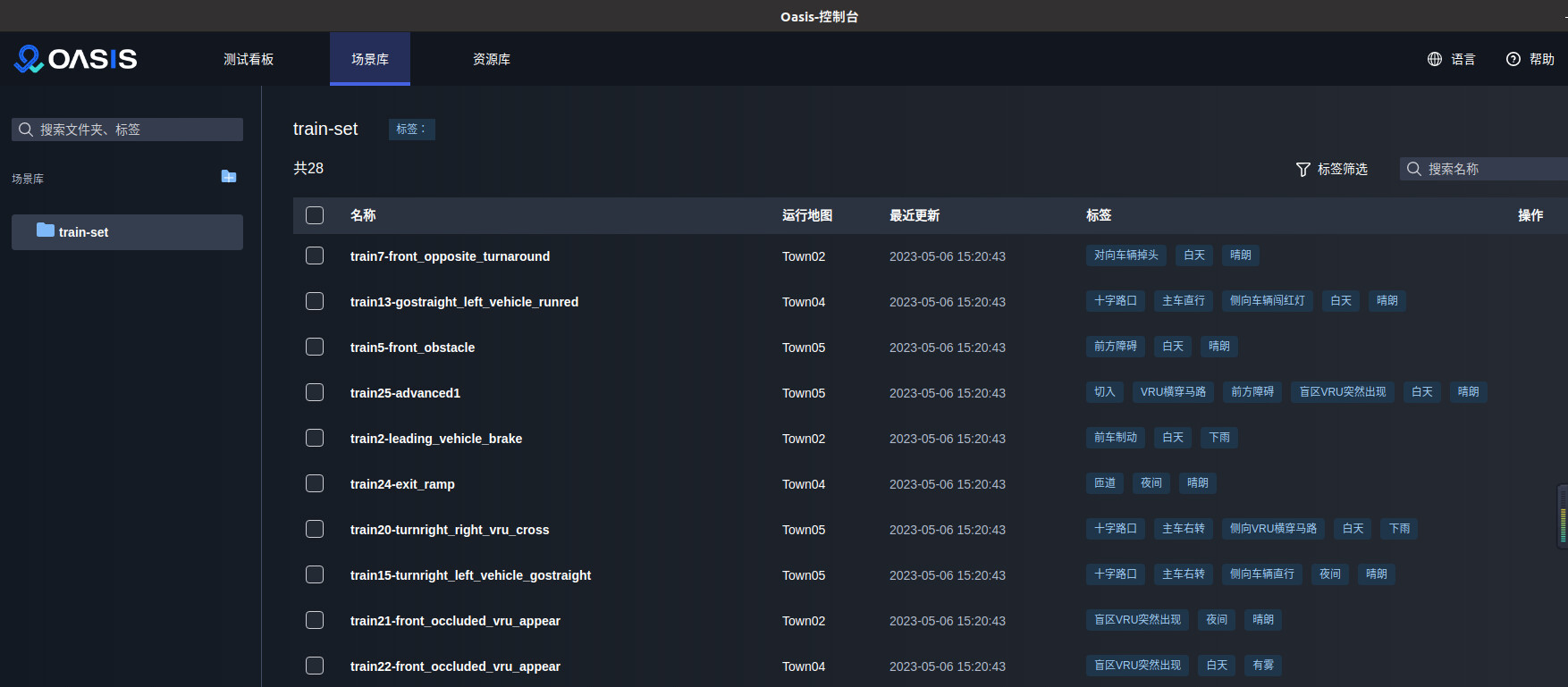
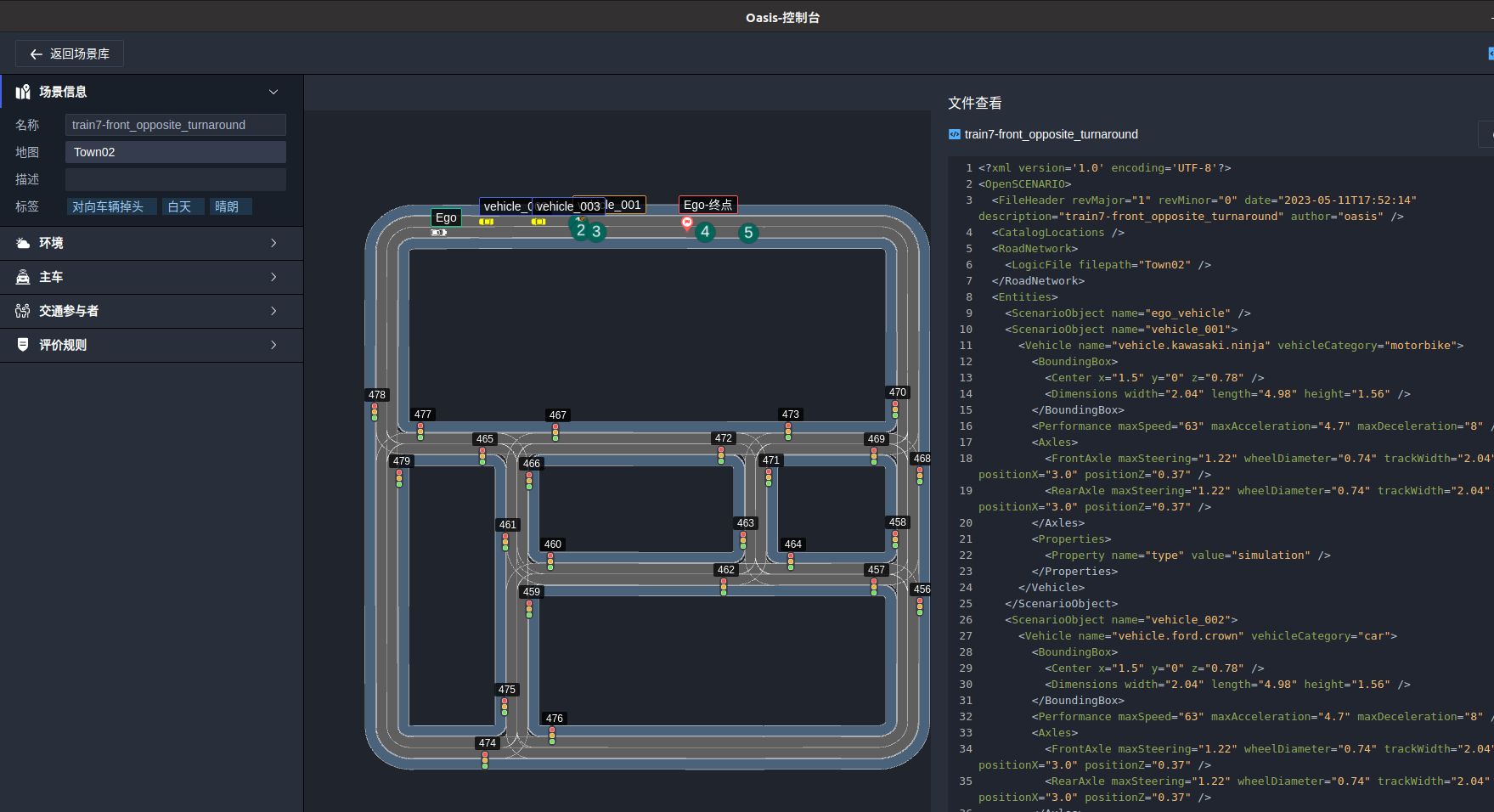
场景库管理
OASIS SIM内置丰富的场景库,基于Openscenario编写,且提供场景可视化编辑器,用户可以方便的定义自己的场景库;
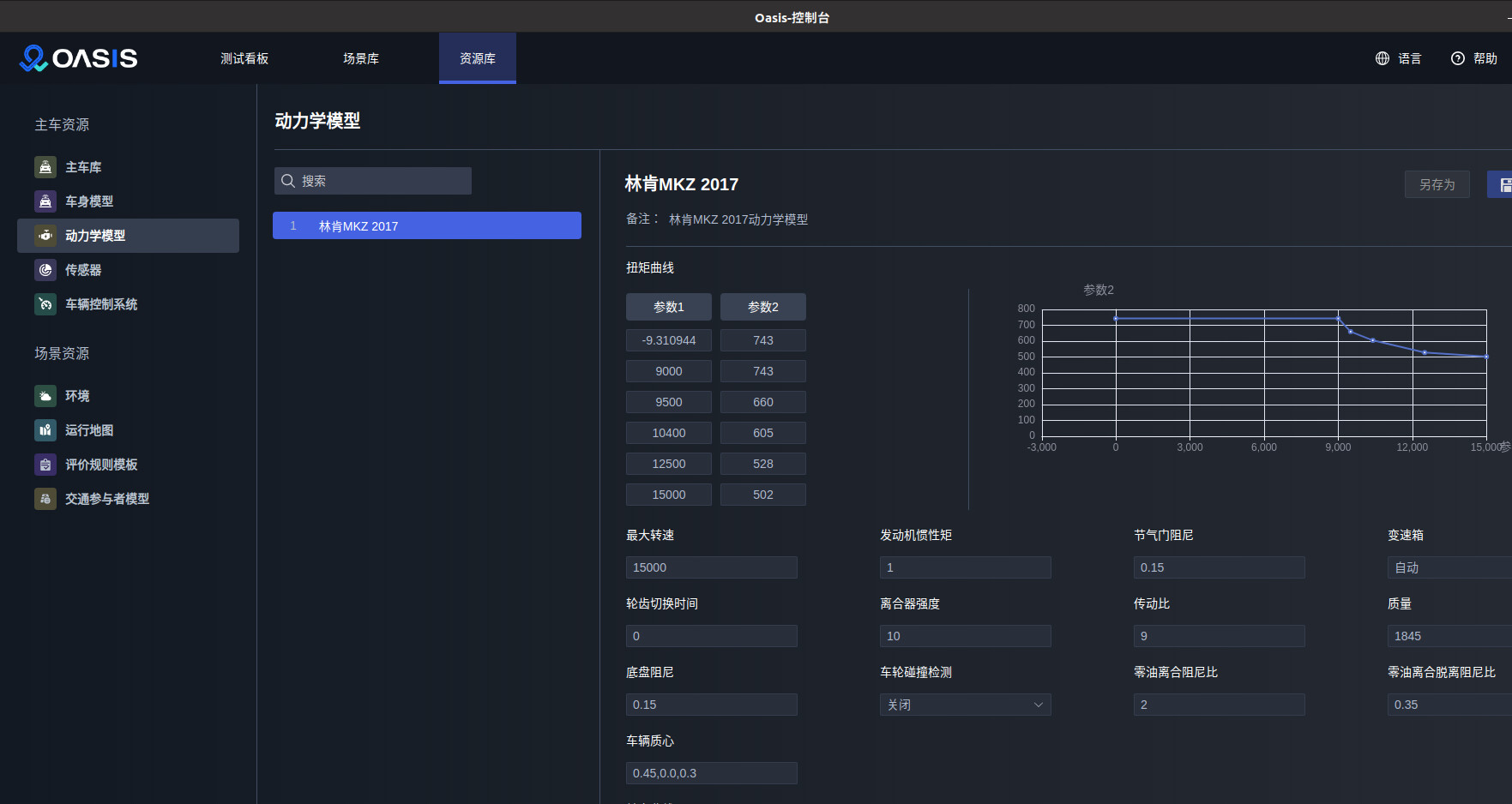
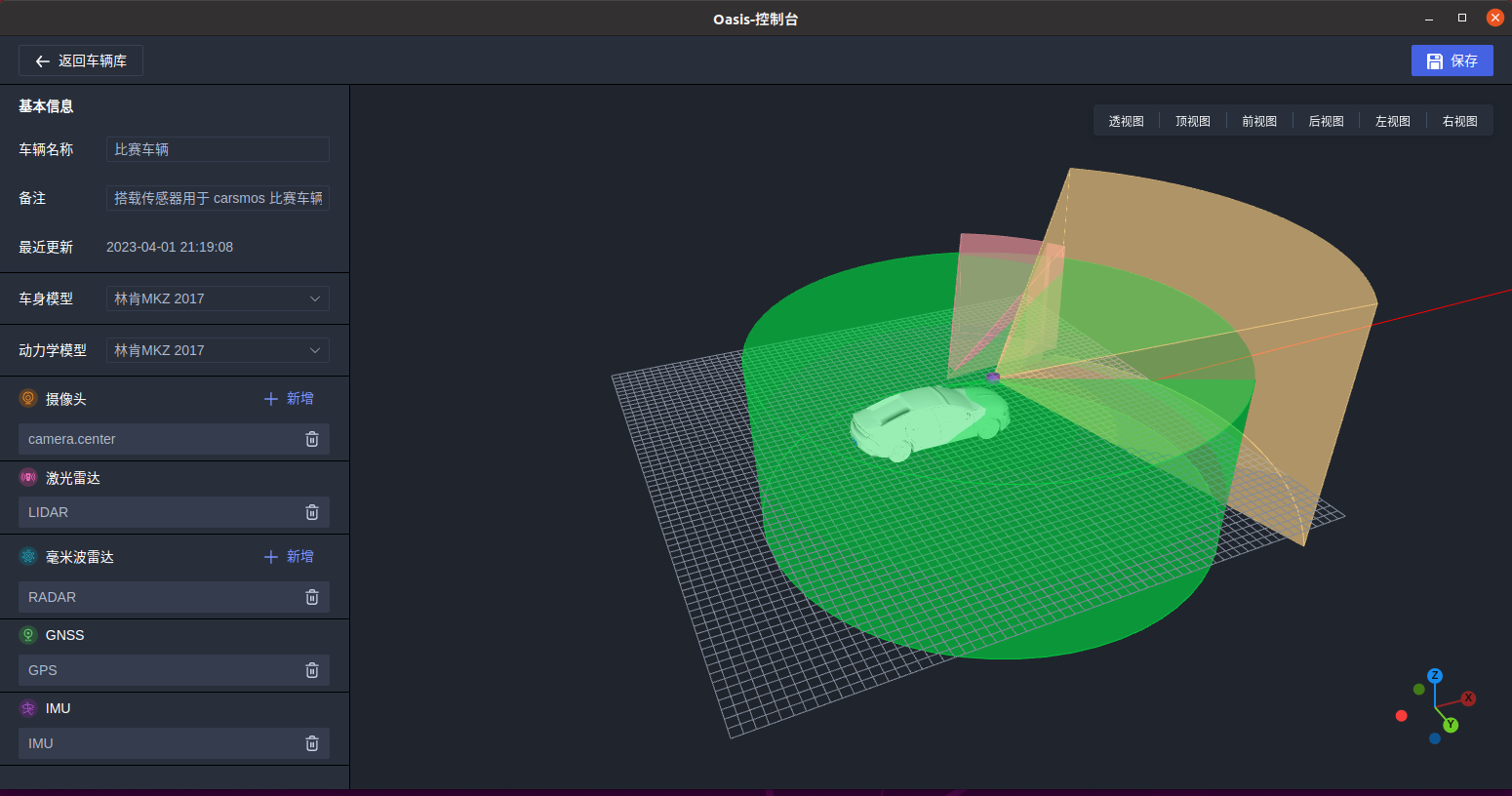
资源库管理
OASIS SIM 提供了丰富的仿真资源,如车辆模型,车辆动力学模型,交通参与者,传感器模型,评价规则定义,地图,车辆控制系统等。
测试回放